|
Робот МиниСумо №2 (Циклоп-1) |
|
Автор Administrator
|
|
12.03.2008 г. |
|
Завершена разработка и тестирование робота для МиниСумо №2 (проект Циклоп-1)
Мобильный робот, разработанный для участия в соревнованиях RoboSumo.
Является развитием проета РБА 1
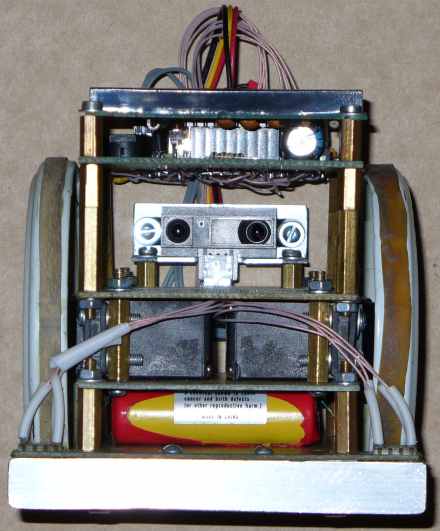
Проект отличает наличие датчика расстояния (Sharp GP2D120), который позволяет роботу производить поиск и последующее сопровождение цели. Применение одного датчика (отсюда и происходит название Циклоп) потребовало гибкого алгоритма.
Галерея




Механика
Механическая часть не подверглась сильным изменениям:
добавлена защита датчиков поверхности,
препятствующая их механическому повреждению.
Электроника:
Бортовой компьютер выполнен на одной микросхеме. Микроконтроллер ATMega8 обеспечивает весь функционал робота в реальном режиме времени.
На борту интегрирован интерфейс RS232, что позволяет получать телеметрию с робота в режиме on-line и производить смену прошивки микроконтроллера без дополнительного программатора.
Введен индикатор, отображающий системную информацию.
Добавлен динамик.
Управление энергопотреблением (управляет подачей питания на датчик расстояния, в зависимости от текущего режима работа)
Поведенческий алгоритм
Включает набор маневров (отойти назад, отойти влево, отойти вправо, поиск цели, сопровождение цели, гулять, пустышка), имеющих приоритеты (самый высокий у маневров "отойти назад"), переходы между ними, блока анализа ситуации, который выдает рекомендуемый маневр - если его приоритет выше приоритета текущего маневра - происходит переход к выполнению маневра более высокго приоритета.
Приложение
Схема электрическая принципиальная робота MiniSumo (Циклоп - 1)
Прошивка микроконтроллера
|
|
Последнее обновление ( 14.06.2011 г. )
|