Описание РБА-1 (Робот Борец Автономный № 1)
Мобильный робот, разработанный для участия в соревнованиях RoboSumo.
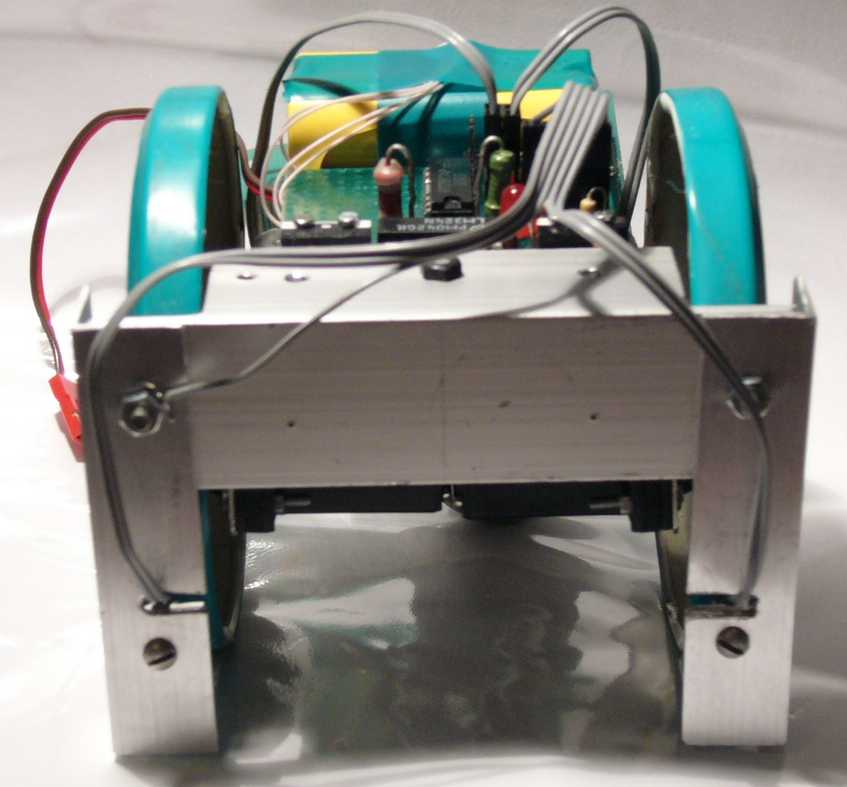
Механическая часть Робот собран по классической трехколесной схеме с двумя ведущими и задним подруливающим колесом. Правила, предъявляемые к роботам категории minisumo (вес до 500г, габариты до 10x10 см) потребовали весьма компактного размещения элементов.
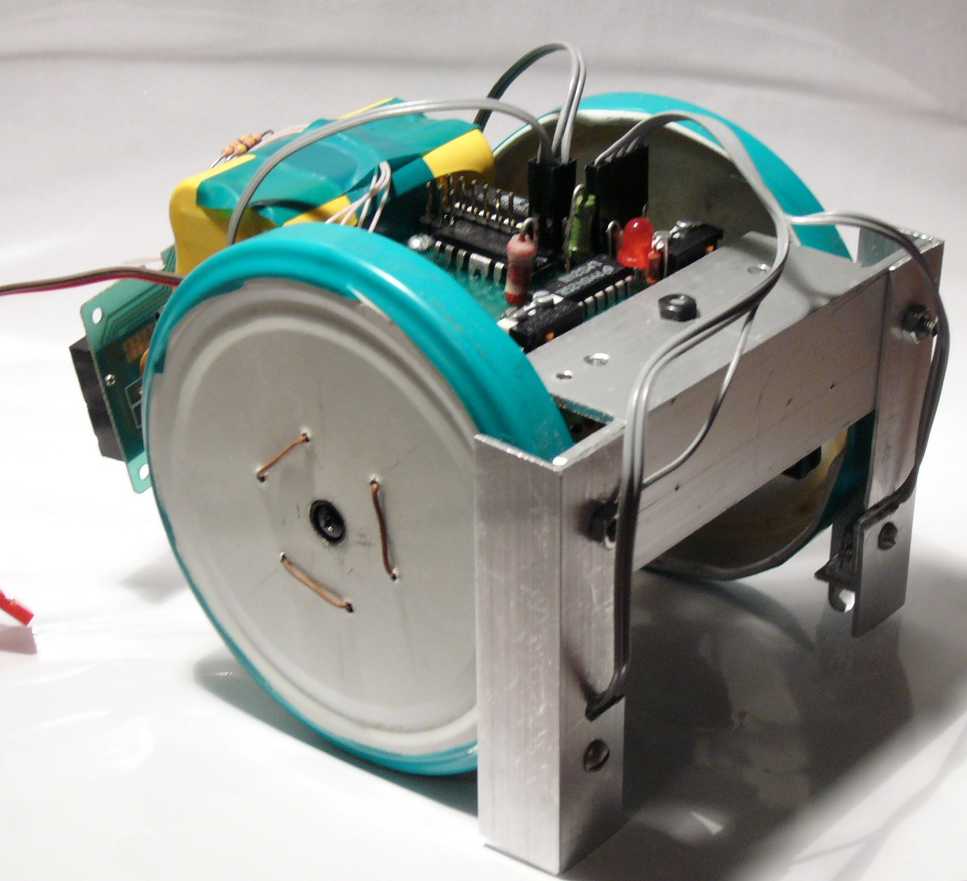
Двигатели переделаны из сервоприводов Futaba (цена 15$). Колеса сделаны из консервных крышек. По ободу на них наклеен скотч, что улучшило их сцепление с поверхностью.
Сенсоры.
Робот имеет сенсоры:

Контактный бампер прикрывает фронтальную плоскость робота. Он свободно вращается вокруг вертикальной оси, замыкая в крайних положениях кнопочные выключатели (из мыши). При отсутствии препятствия бампер возвращается в исходное положение за счет возвратной силы выключателей. Такая кострукция потребовала настройки, но оказалась вполне работоспособной.

ИК датчии расположены в нижних углах бампера перед колесами. Состоят из пары светодиод+фотодиод ИК диапазона (цена 5р/шт). Оценивая освещенность под фотодиодом при включенном и при выключенном светодиоде позволяет сделать вывод о цвете поверхности, или о ее наличии.
Мозги собраны на ATTINY26L (цена 60р)
Двигатели управляются через драйвер 1128КТ4 (25 руб) (аналог L293D 80р.). Используется отечественная микросхема - проблем не замечено.
- движение вперед, пока не наехали на белую полосу
- если зафиксирован физический контакт - движение в сторону котакта.
- Отработка данного алгоритма
- Отработка контакта с белой полосой
- Отработка контакта с физическим объектом
Замечания:
Подруливающее колесо на основе маленького мебельного ролика абсолютно бесполезно. Оно тащится за роботом не поворачиваясь (не хватает сцепления с поверхностью). Сейчас думаю как от него избавится, поскольку оно является несущим элементом для аккумулятора.
Жесткие требования к размерам привели к тому, что датчики в крайних положениях соприкасаются с колесами - возможное решение - уменьшение диаметра колес (от банок поменьше :)
Планы:
- Разработка новой платформы
- Переход на более мощный процессор
- Организация бортовой сети
- Двухстороння связь с ПК
- Ультразвуковой сонар
Алгоритм работы