| Line Tracer |

|

|
| Автор Administrator | |
| 17.08.2008 г. | |
Описание разработки робота для соревнований ОТСЛЕЖИВАНИЕ ЛИНИИ
Line tracerМатериалы по самостоятельной сборке робота для LineTrace. ТЗ (техническое задание) в соответствие с выработанными на РобоФоруме правилами для соревнований ОТСЛЕЖИВАНИЕ ЛИНИИ:Отслеживание линии (правила) Механика
В качестве тележки был найден конструктор-погрузчик фирмы TAMIYA
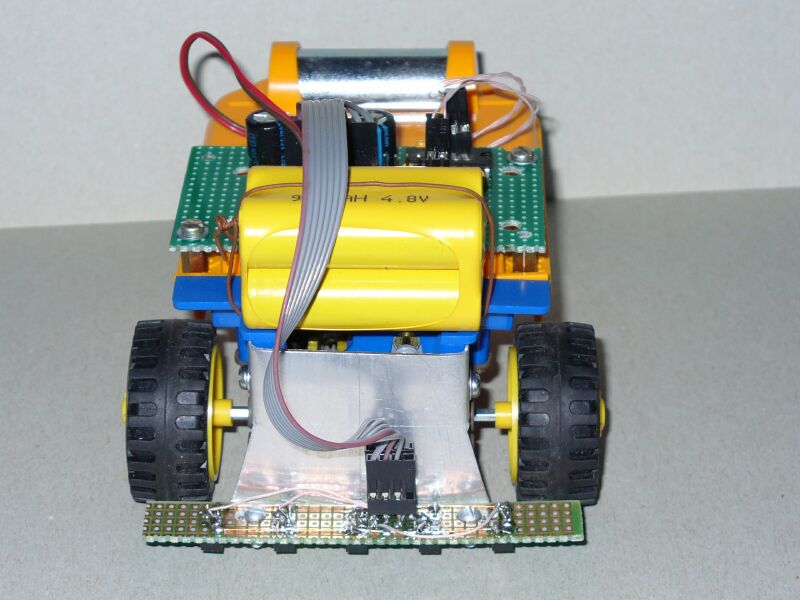
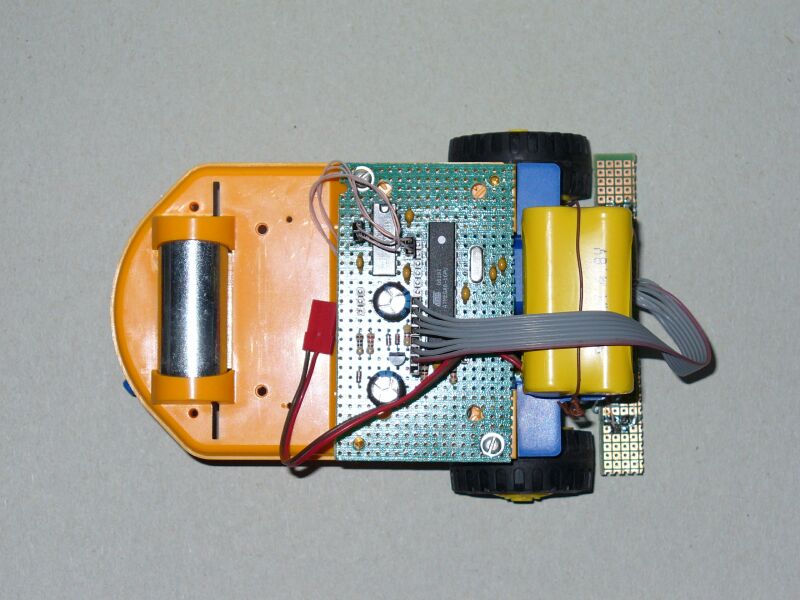
Аккумуляторы размещены в передней части. (сначала разместил их позади, где очень удачное место по габаритам, но оказалось, что нагрузка на переднюю часть недостаточна и пришлось переместить их вперед) ЭлектроникаЭлектроника робота состоит из:1. Основной компьютер 2. Линейка датчиков На двигатели впаяны шумоподавляющие конденсаторы 0,1uF (видны на фото "снизу" Основной компьютерЭлектроника сделана на макетной плате. В качестве мозга использован микроконтроллер Mega8 в DIP исполнении, двигатели управляются через L293 - метод управления ШИМ Питание - 4 аккумулятора типа AA, емкостью 600maH
Линейка датчиковЛинейка датчиков состоит из 5-и элементов (применены qrd1114), размещенных на высоте 4мм от пола. Расстояние между элементами 15мм. Линейка датчиков смонтирована на макетной плате, которая крепится к корпусу через кронштейн. Линейка датчиков соединяется с основной платой 7-и проводным кабелем.
Фотки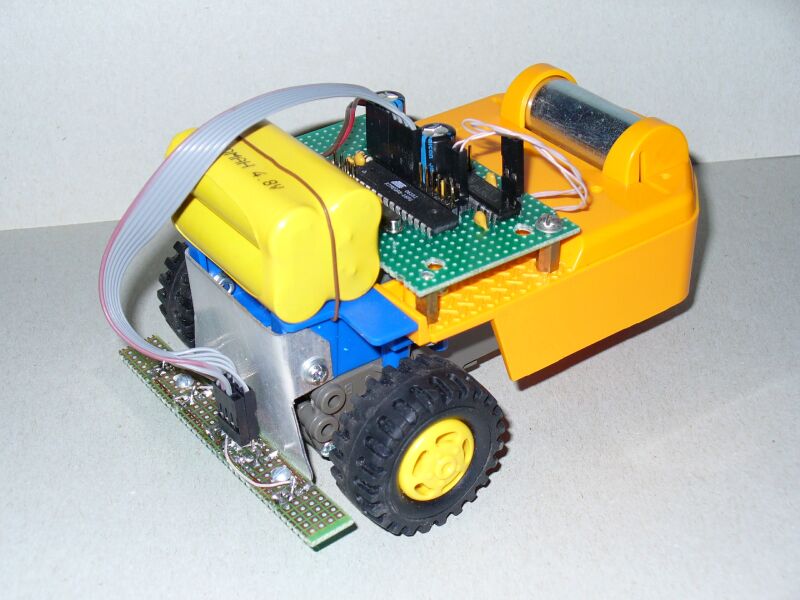

|
|
| Последнее обновление ( 17.08.2008 г. ) |


| « Пред. | След. » |
|---|
