| Сенсор из оптической мыши |

|

|
| Автор Administrator | |
| 28.01.2009 г. | |
|
Использование микросхемы из оптической мыши в качестве видеокамеры
В современных серийно выпускаемых компьютерных мышах используется оптический датчик поверхности, определяющий перемещение мыши по-поверхности. Датчик такой микросхемы, обычно 16x16 с 64 градациями серого. Подключив такой датчик к мокропроцессорной системе можно получать и обрабатывать изображение низкого разрешения. В данном проекте рассказывается о подключении такого датчика.
В качестве устройства-донора была взята неработающая радиомышь неизвестно происхождения. При вскрытии была обнаружена микросхема с маркировкой A2030, которая была идентифицирована, как ADNS2030. Микросхемы ADNS2030 и ADNS2051 различаются напряжением питания. Вторая используется в обычных проводных мышах и питается от источника +5V (автор не проверял ее работосопсобность, но вероятно они взаимозаменяемы (с учетом напряжения питания)) Вместе с датчиком на плате размещается обвязка Схема платы оптической мыши
Схема на микропроцессоре ATMega8 для подключения датчика
По даташиту микросхема должна была работать по следующему алгоритму: Однако вышеприведенную последовательность не удалось довести до рабочего состояния и был реализован следующий алгоритм: Ппрограмма для персонального компьютера принимает данные от микропроцессорной системы по последовательному порту и отображает их в виде картинки в реальном режиме времени. Настройки последовательного порта: порт COM1, скорость 19200, формат 8-n-1, контроль потока отключён. В панели управления Windows следует настроить на данный порт указанные параметры. Микропроцессор высылает данные в формате 0..63 (градации яркости) для каждого пикселя (пакет из 256 байт), каждый пакет разделяется байтом с кодом 64 Общий вид собранного устройства:
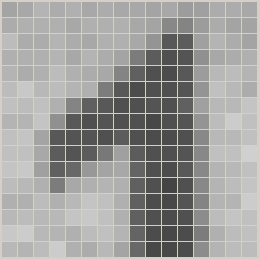
Полученное изоюражение:
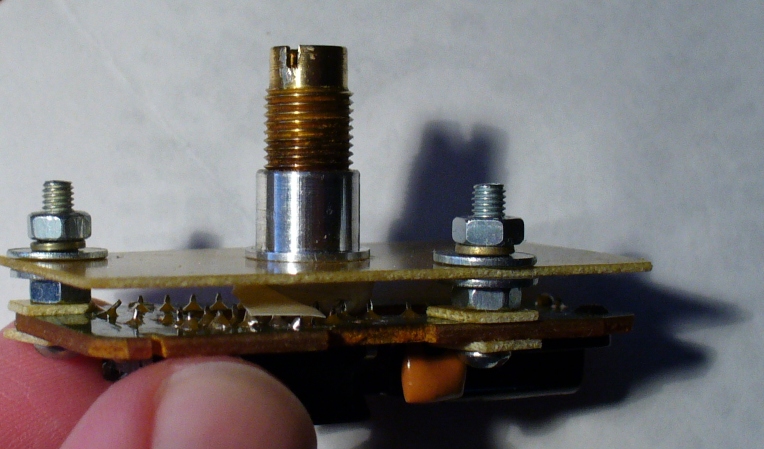
Размер полученной видеообласти составил примерно 1x1мм Предположительно, сенсор в этой микросхеме имеет следующий формат: Задавшись желаемым полем зрения сенсора 20мм, была подобрана линза с малым фокусным расстоянием (от старого дозиметра) и собрано крепление, обеспечивающее подстройку совмещения оптических осей линзы и сенсора и возможность фокусировки.
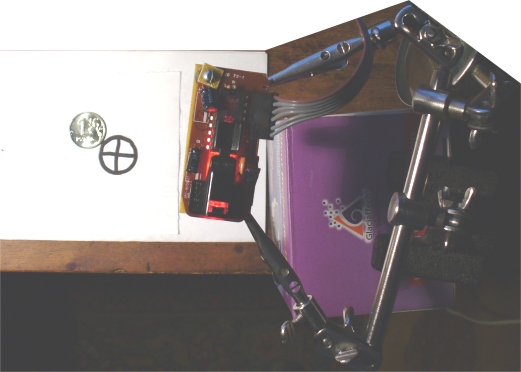
Общий вид эксперементального устройства:
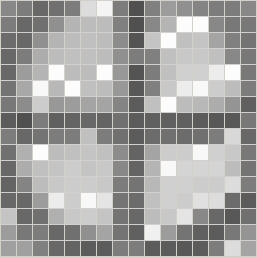
В качестве изображения было сформировано:
После настройки системы (центровка оптики, настройка положения линзы - вращением), было получено изображение:
Собранное изделие в деталях:
ПРИЛОЖЕНИЕ Алексей Кургузов |
|
| Последнее обновление ( 07.11.2011 г. ) |




| « Пред. | След. » |
|---|
